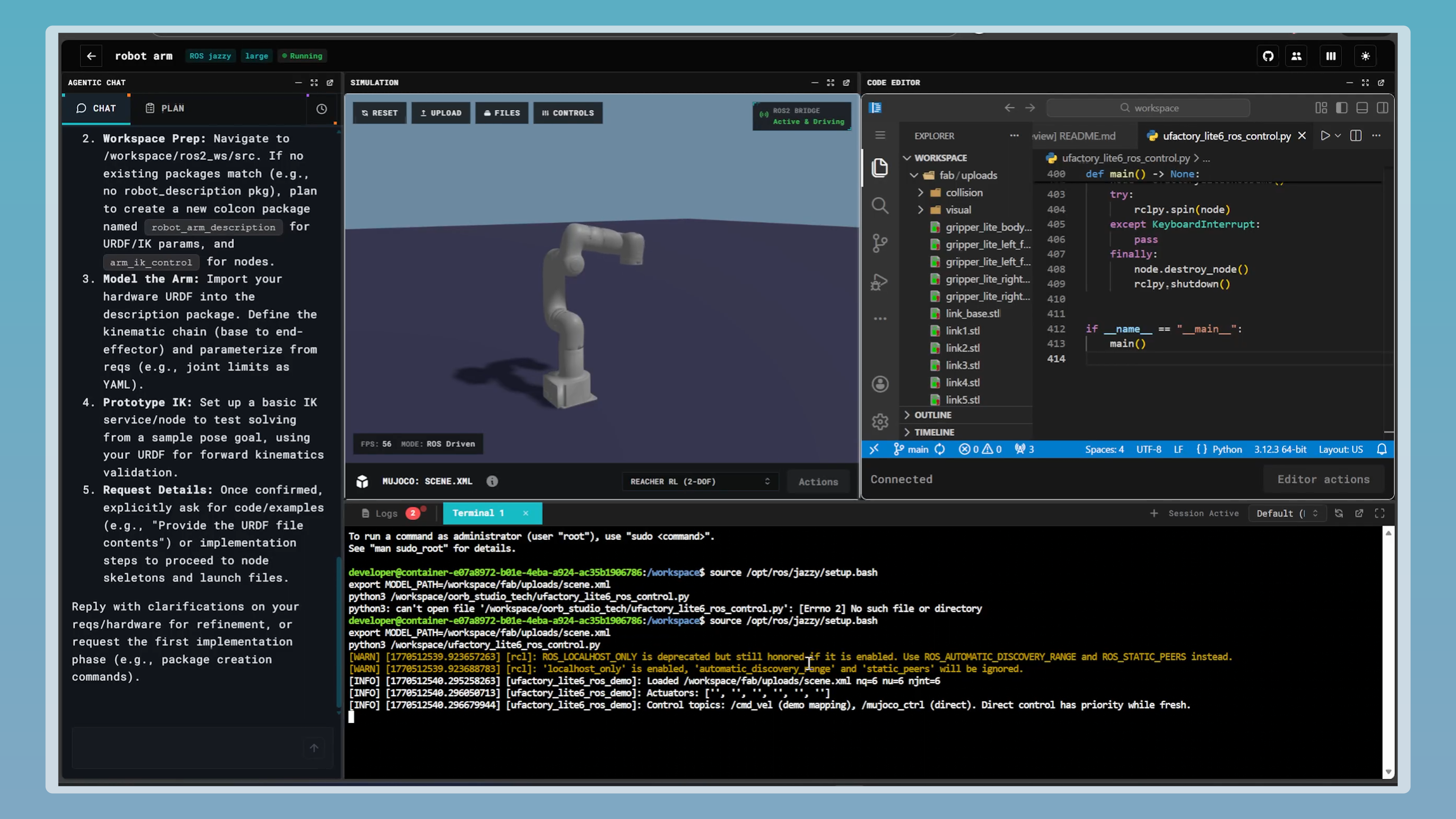
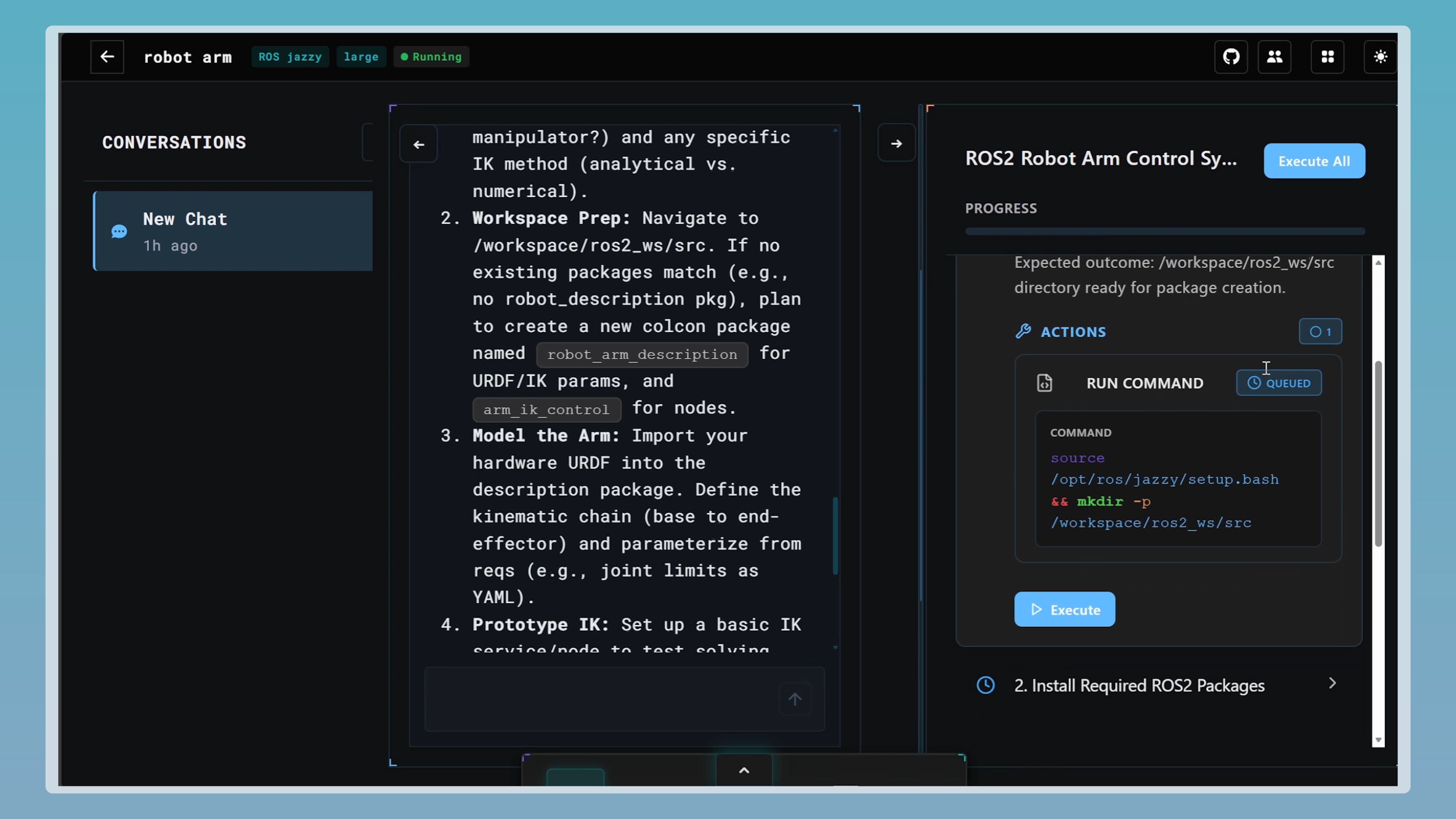
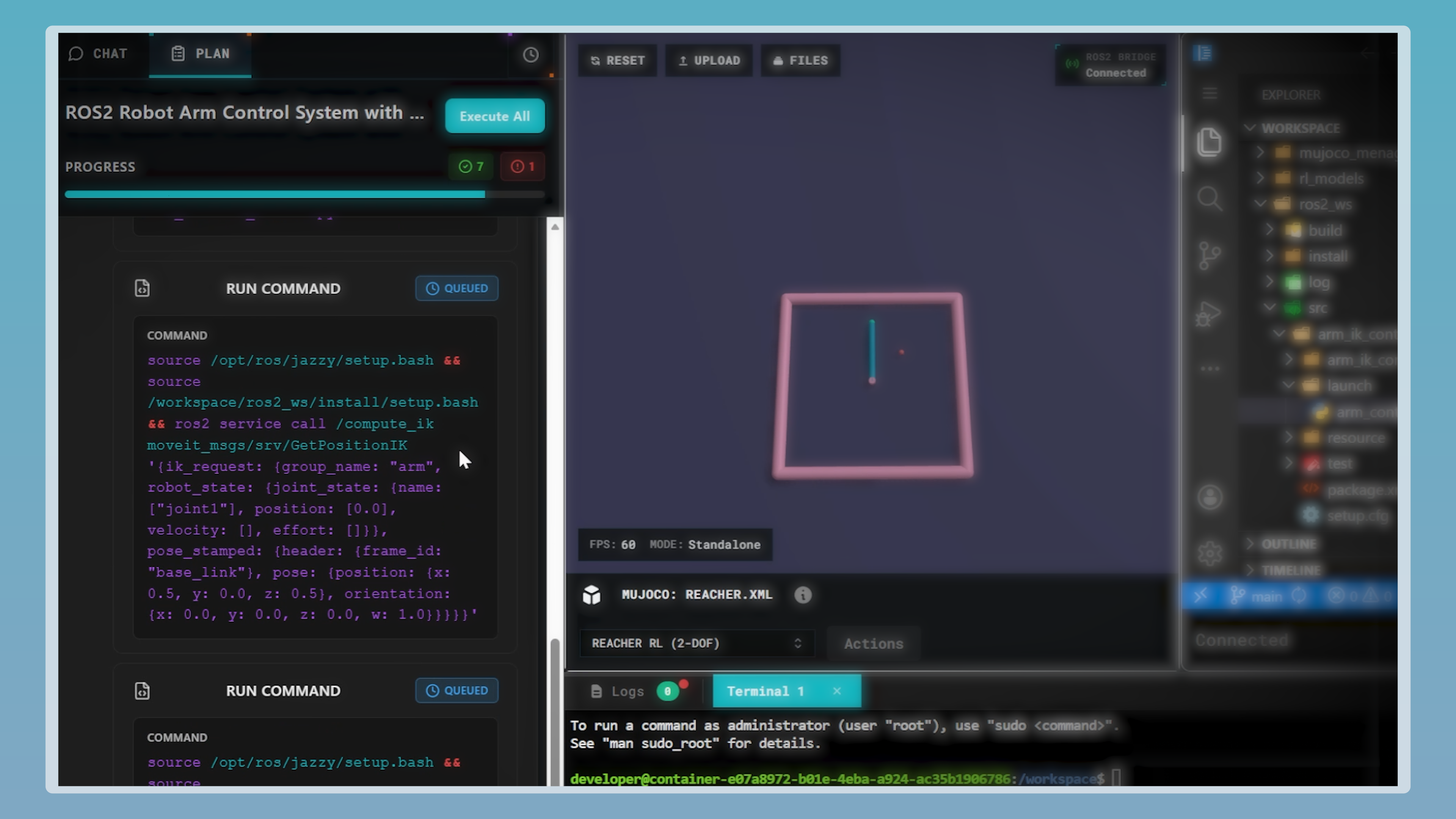
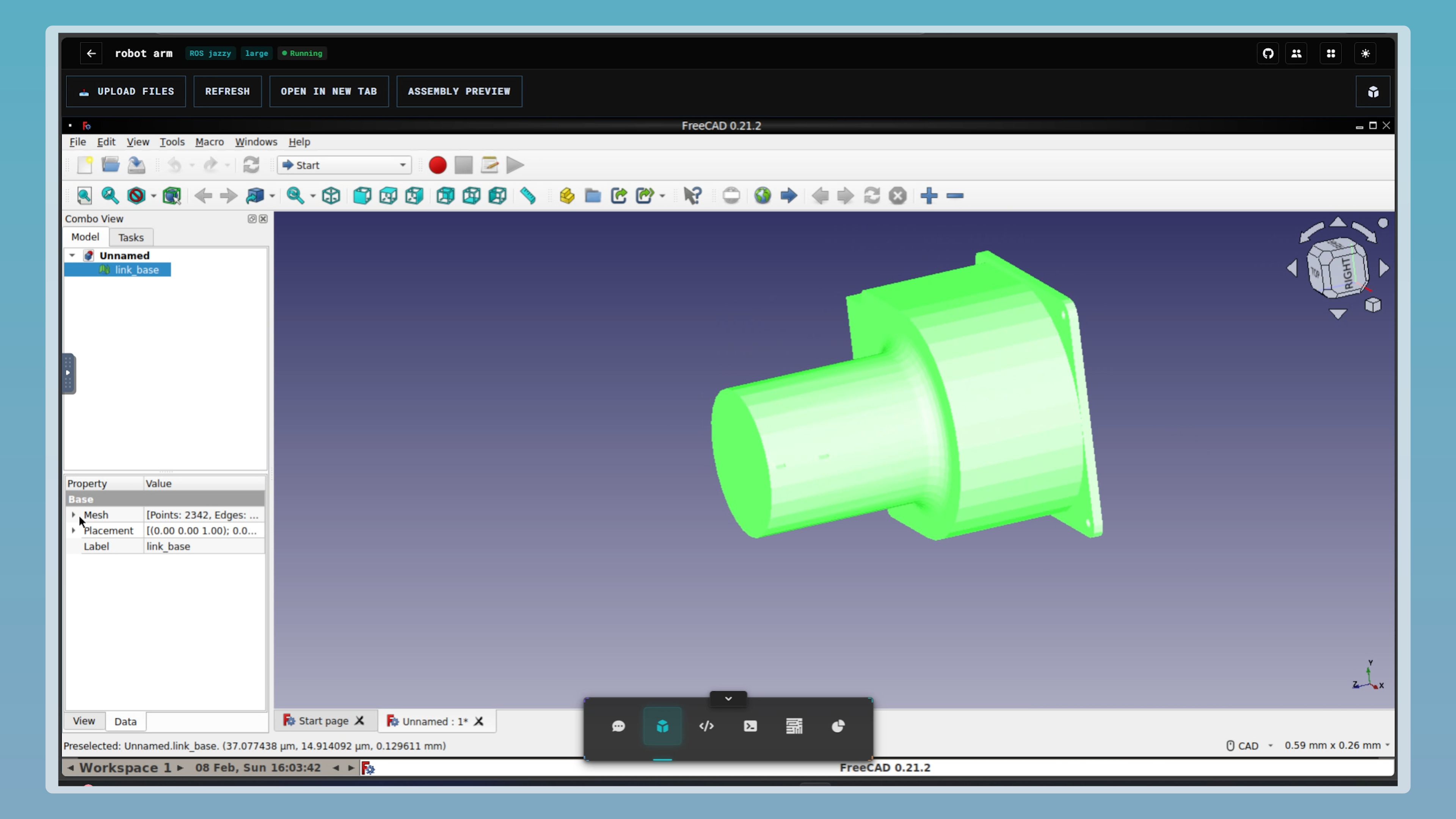
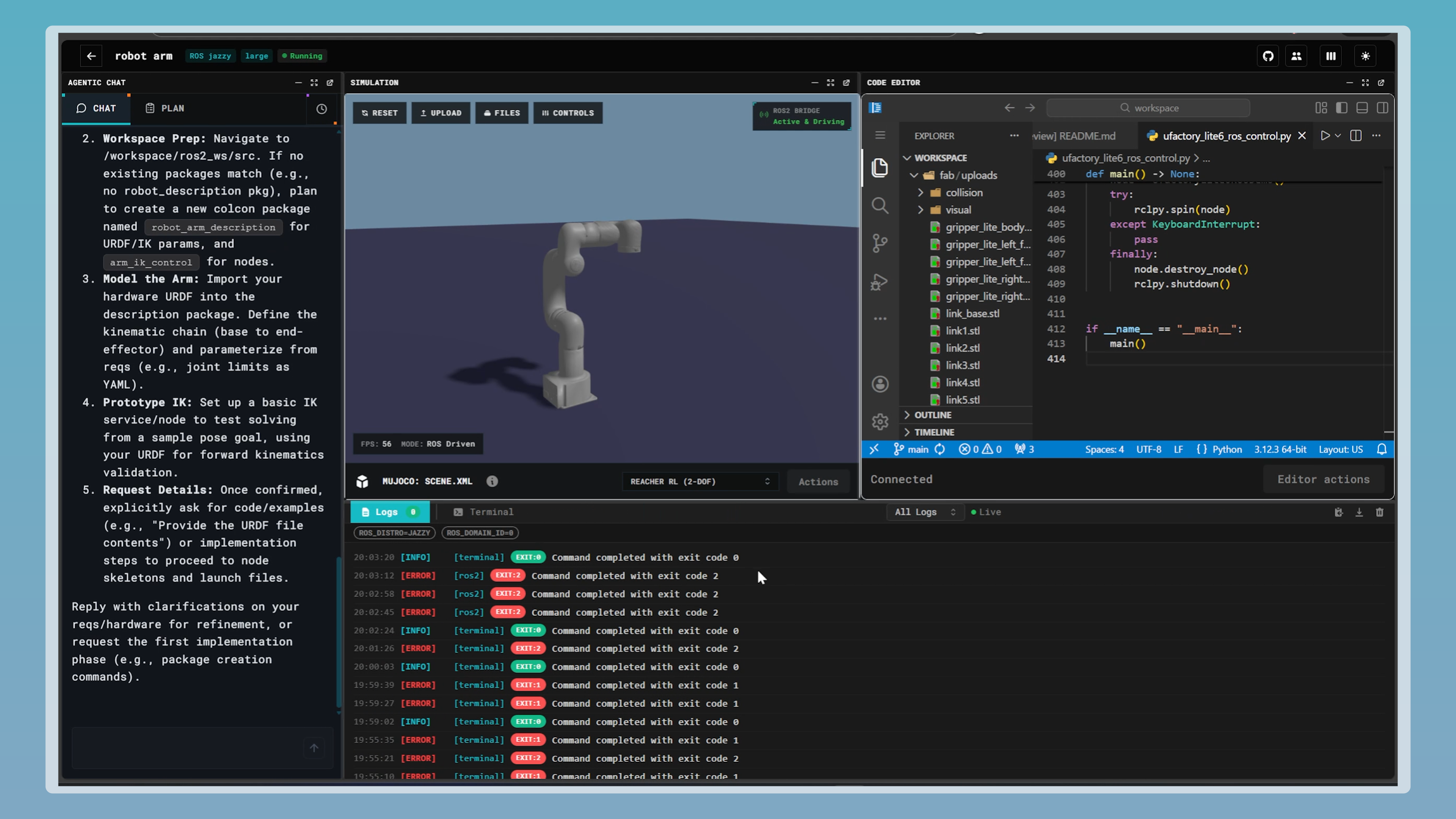
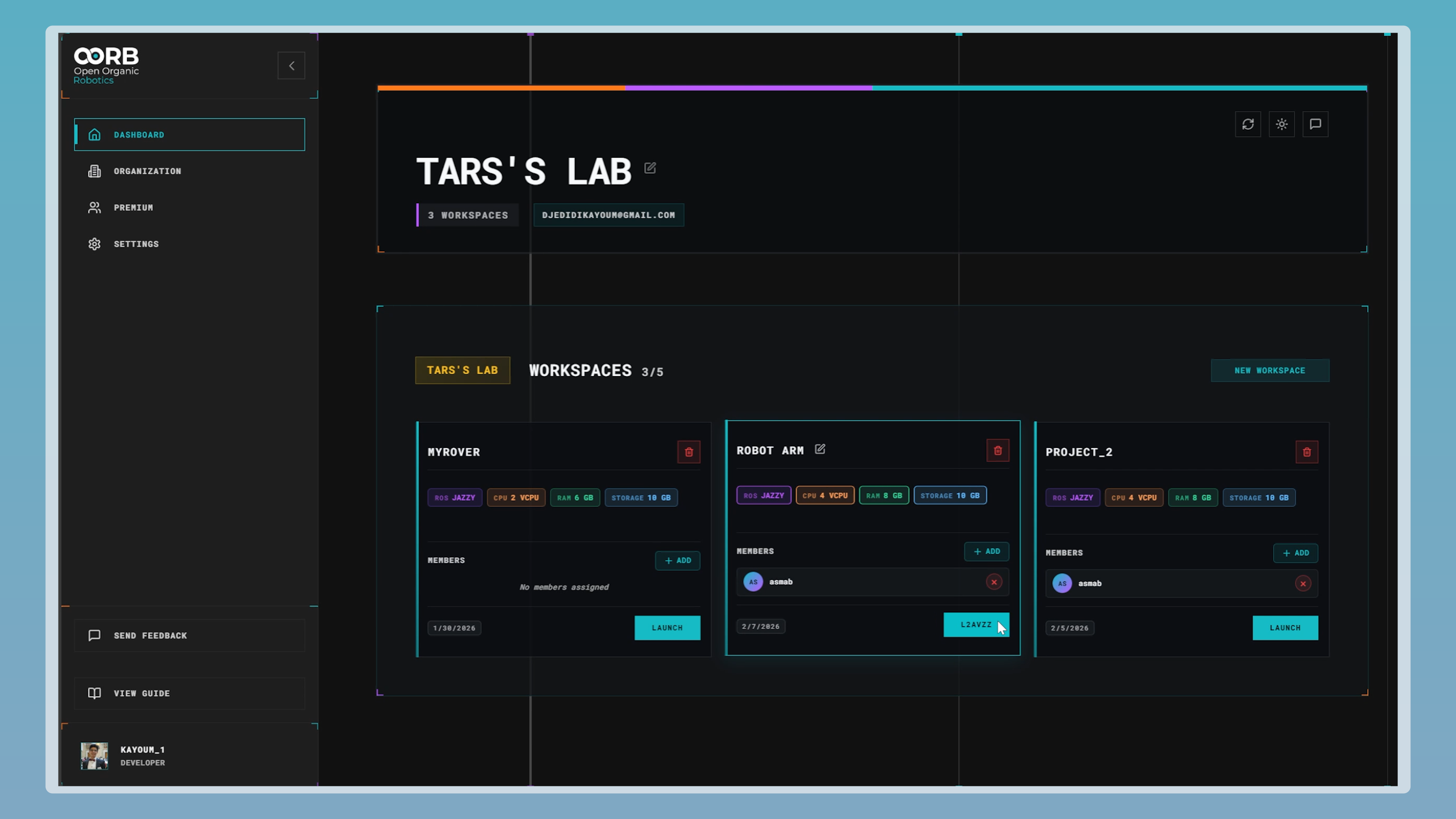
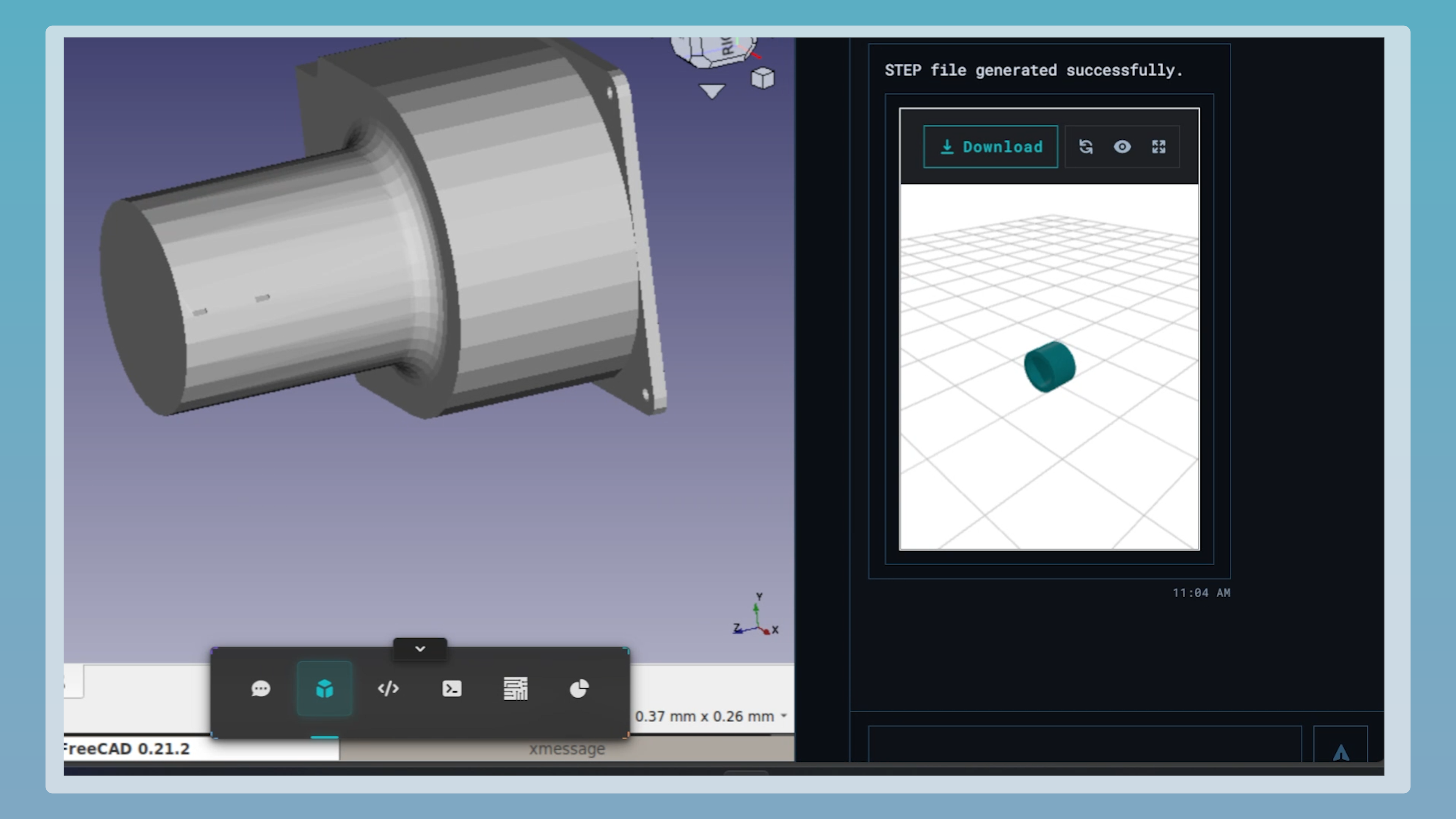
OORB Studio is an agentic, browser-based workspace for ROS 2 robotics. Describe the robot in plain English → get a plan → apply changes to the repo → run MuJoCo simulation → push to GitHub and collaborate with your team. Built for the messy reality of robotics dev: reproducible environments, fast iteration, and a tight feedback loop with builders
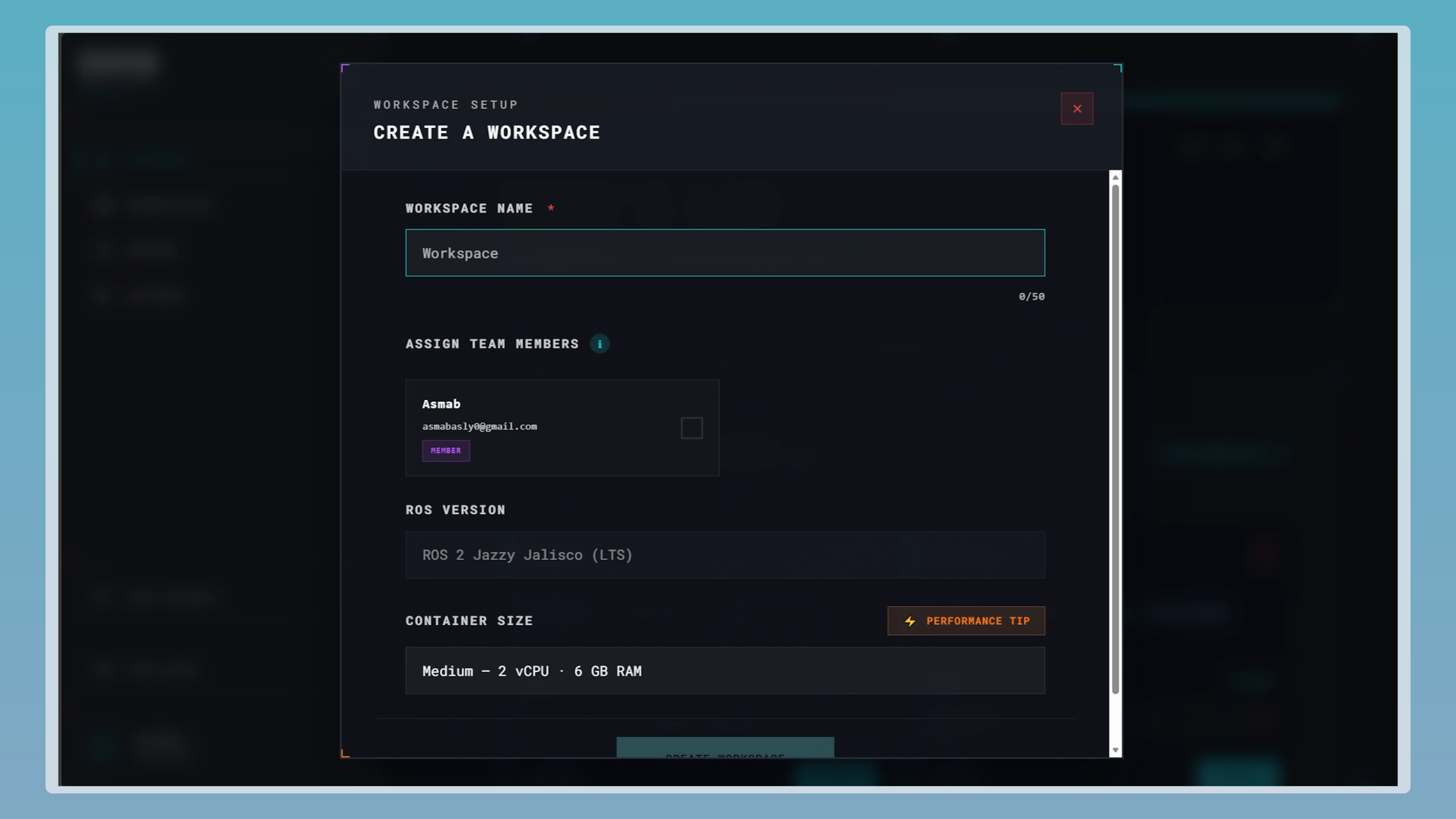
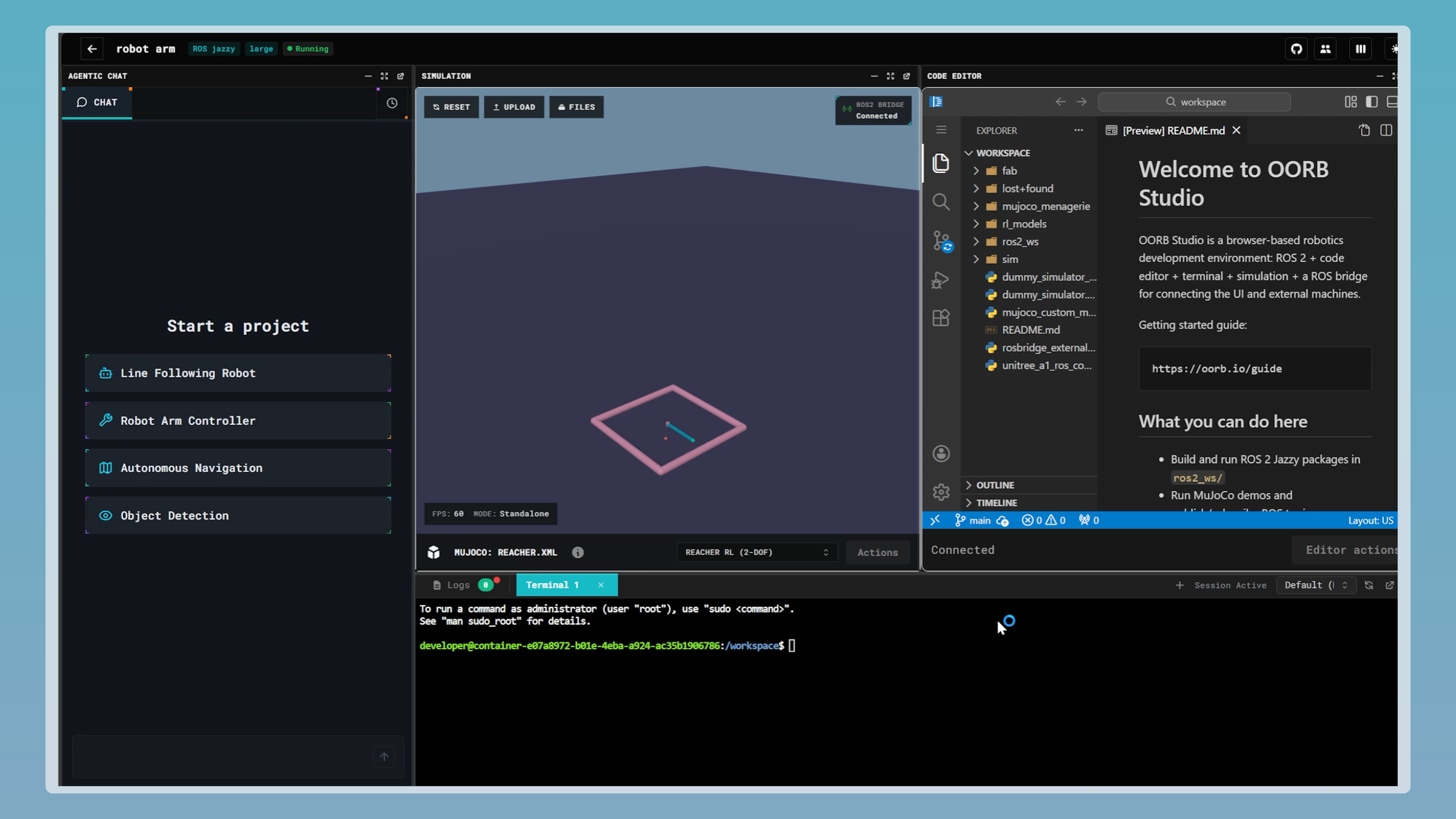
Screenshots
Product Updates (0)
No updates yet. Check back later for updates from the team.
Demo: https://youtu.be/_Bg7-NI_uNU
We built OORB Studio because robotics dev still has way too much setup tax and “works on my machine” energy. This launch is our biggest feature push yet


Comments (19)
Good luck guys
@dimethnoucer Thank you!
Keep it up !
@bentkhayat3 Thanks!
KEEP IT UP !
@eyakarmous Thank you!
Keep it up kayoummmm !
@AbdouSa Thank you!
keep it up !!
@ahmedkahloun Thank you!
Keep up the good work!
Thanks!
Keep it up best of luck 👏🏻❤️
@Ibrahim-ben Thank you!
Well done 👏🏻❤️ ! Keep going 🔥🤖
Thanks!
Looks amazing keep it up !
Thank you!
Keep going ❤️
Thanks <3
🚀🚀🚀🇹🇳
That’s amazing, keep going! 😍
@Baazaouifatma2 Thank you!
Well done 😍🔥
Thank you!
Wow , its amazing 🔥
Thanks!
Brilliant ! Wish you Allll the bessstttt
@Marwamansr Thank you!
wow, its really amazing!!
Thank you! Glad you think so
Love it keep it up !!
@BouazraMehdi Thank you so much!
Tool looks intense but awesome!
@asupkay1124 Haha that's by design, appreciate your feedback
Demo: https://youtu.be/_Bg7-NI_uNU We built OORB Studio because robotics dev still has way too much setup tax and “works on my machine” energy. This launch is our biggest feature push yet